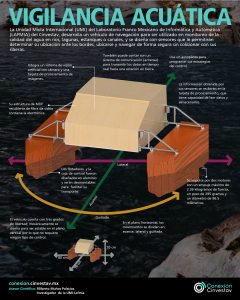






Los ríos y arroyos del país constituyen una red hidrográfica de 633 mil kilómetros de longitud y sus cuencas cubren el 65 por ciento de territorio, indica el Atlas del Agua en México de la Semarnat, esta riqueza natural requiere de un monitoreo constante con el fin de conocer su condición ambiental.
Para hacer frente a ese reto un grupo de investigación del Laboratorio Franco Mexicano de Informática y Automática, Unidad Mixta Internacional, del Cinvestav, desarrolla un vehículo acuático de superficie (tipo lancha) para ser utilizado en tareas de monitoreo de la calidad del agua en ríos, lagunas, estanques o canales de navegación, con un diseño mecánico, instrumentación y estrategias de control que le permitirán realizar tareas de seguimiento de trayectorias de forma autónoma.
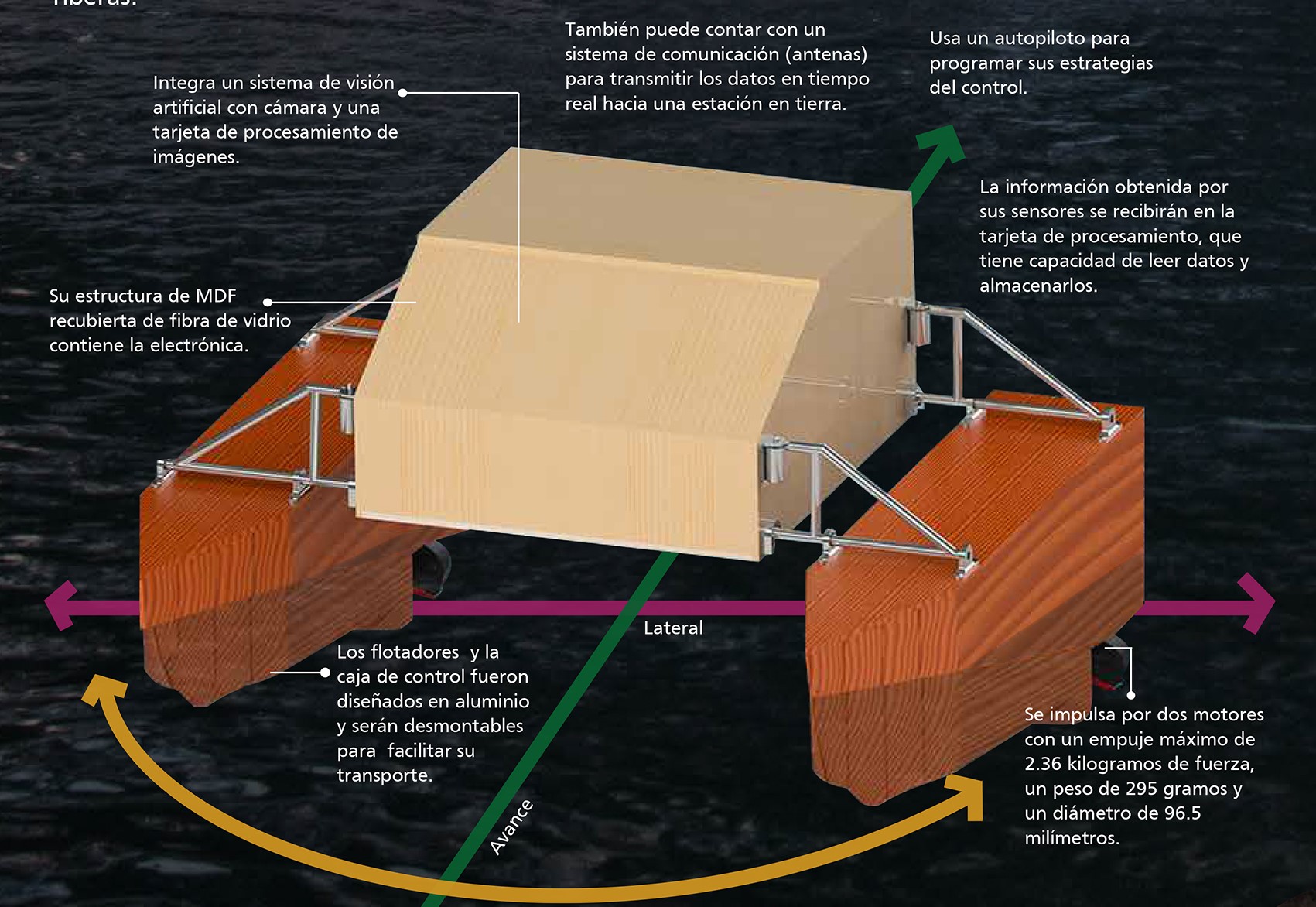
“El vehículo contará con un sistema de visión artificial, compuesto por una cámara de visión estéreo (con los principios de visión estereoscópica de los seres vivos, al utilizar dos lentes para triangular las imágenes y obtener con ellas una sola) y una tarjeta de procesamiento de imágenes, ya que al emplearse en ambientes desconocidos, esa herramienta lo dotará de habilidad para desplazarse, centrarse y realizar navegación autónoma, sin chocar con bordes u obstáculos”, explicó Filiberto Muñoz Palacios, líder del proyecto.
El dispositivo será útil para navegar en ambientes que presenten corrientes ligeras y operar de forma autónoma mediante trayectorias preprogramadas en zonas lacustres, donde no se conozca un mapa de navegación; además, de lugares estrechos, como los canales de Xochimilco.

Las dimensiones del vehículo son de 80 centímetros de ancho, 70 de largo y 70 de altura, con una estructura de MDF recubierta de fibra de vidrio; sus flotadores, con la caja de control, se diseñaron en aluminio y serán desmontables.
El vehículo contará con dos motores con un empuje máximo de 2.36 kilógramos de fuerza, un peso de 295 gramos y un diámetro de 96.5 milímetros, e integrará un autopiloto de programación de estrategias de control, una cámara estéreo y una tarjeta de procesamiento que le permitirá implementar los algoritmos de visión desarrollados por los investigadores del Cinvestav.
Contar con redes neuronales le permitirán establecer una estrategia de control sin necesidad de conocer el modelo matemático del mismo, desde el punto de vista de control automático, estas redes forman parte de algoritmos inteligentes que facilitan el control de sistemas con poco o nulo conocimiento del mismo.
“Los algoritmos de visión por computadora que desarrollamos le permitirán al vehículo determinar su ubicación con respecto a los bordes de un canal, y con esa información localizarse dentro él y navegar de forma segura, sin colisionar con sus riberas”, señaló
Muñoz Palacios. La información obtenida por sus sensores de parámetros ambientales, se recibirán en la tarjeta de procesamiento, donde se implementa el algoritmo de visión, que tiene capacidad de leer los datos y almacenarlos, también se puede agregar un sistema de comunicación (antenas) para transmitirlos en tiempo real hacia una estación en tierra.
 La técnica de control del vehículo utilizando redes neuronales consiste en introducir una estructura matemática llamada identificador neuronal dinámico, cuyo objetivo es determinar su comportamiento (sin conocer las dinámicas del mismo); con esa información puede proponer una estrategia por realimentación y compensación; sus ventajas son evitar la necesidad de conocer el modelo dinámico o los parámetros del sistema e identificar y compensar las perturbaciones externas que afectan el comportamiento del vehículo.
La técnica de control del vehículo utilizando redes neuronales consiste en introducir una estructura matemática llamada identificador neuronal dinámico, cuyo objetivo es determinar su comportamiento (sin conocer las dinámicas del mismo); con esa información puede proponer una estrategia por realimentación y compensación; sus ventajas son evitar la necesidad de conocer el modelo dinámico o los parámetros del sistema e identificar y compensar las perturbaciones externas que afectan el comportamiento del vehículo.
El vehículo se encuentra en fase de instrumentación (ya se diseñó y construyó su estructura); al momento se realiza la integración de los dispositivos electrónicos (autopiloto y cámara de visión) que permitirán la implementación de los algoritmos de control y visión, en fecha próxima se emprenderán las pruebas experimentales en los canales de Xochimilco u otros cuerpos de agua, aseguró Filiberto Muñoz Palacios.